Bericht zur Doppelcenterkonfiguration
Fazit:
- Ohne akustisch transparenter Leinwand kommen Dialoge nun virtuell aus der Mitte des Bildes.
- Ich bin mit dem Ergebnis sehr zufrieden – Ziel erreicht.

Aufbau:
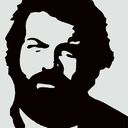
- Mein bisheriger Center (Klipsch RC-35), platziert über der Leinwand, wurde ergänzt durch einen zweiten RC-35 (aus der Bucht um 100€) der nun unter der Leinwand steht.
- Dämmungen für die Erstreflexion an Decke und Boden sind angebracht.
- Angesteuert werden die Center von einem miniDSP 2x4 HD und zwei separaten Kanälen der t.amp E4-250.
- Die Center sind so angewinkelt, dass sich der Direktschall auf Entfernung der Sitzreihe in Kopfhöhe trifft.
- Die Einmessung mit REW ergab 0dB Pegeldifferenz und 0,2ms Delay – Ich sitze anscheinend ziemlich zentral. Ginge wahrscheinklich auch ohne miniDSP.
- Ohne Aktualisierung der MultEQ-X Messung war der Klang gar nicht gut und es hat sich kein virtueller Center ergeben.
- Nach der Einmessung ist der Klang nun sehr gut (Im Rahmen eines RC35) und die Dialoge kommen jetzt klar aus der Mitte der Leinwand.